PIRC - Predictive and Intuitive Robot Companion (2020 - 2025)

PIRC targets a psychology-inspired computing breakthrough through research combining insight from cognitive psychology with computational intelligence to build models that forecast future events and respond dynamically. In PIRC, we will apply our machine learning and robotics expertise, and collaborate with researchers in cognitive psychology. The goal is to apply recent models of human prediction and intuitive action on perception-action loops of future intelligent robot companions. See more information at the project website.
COCOMO: Co-evolution of Control and Morphologies
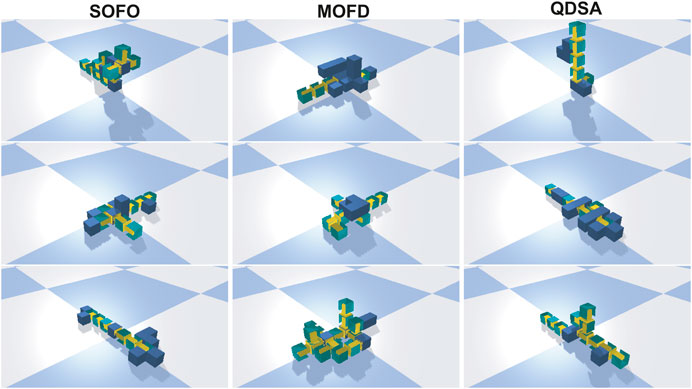
The COCOMO project takes on the difficult challenge of automatically co-designing robotic bodies and brains, through the use of biology-inspired methods. The project investigates how different types of control systems, building instructions, and building blocks affect the process of co-designing robotic bodies (morphologies) and brains (controllers). While parts of the EPEC project used real-world robots, the core methods of the COCOMO project are computer simulations of virtual robots. This allows us to investigate a much wider range of components in the design process. We also investigate the use of different types of algorithms to promote an exploratory search for new body-brain combinations, such as open-ended algorithms and quality-diversity approaches.
SmartAUVs

The Smart AUVs project is led by the Norwegian Geotechnical Institute (NGI), and aims to significantly improve the effectiveness of autonomous underwater vehicles (AUVs) for marine monitoring by developing intelligent algorithms allowing the vehicle to adjust its travel path and data acquisition scheme based on sensor measurements in real time. Norway is investing heavily in full-scale carbon capture, transport and storage. A key aspect in the Smart AUVs project is to strengthen the confidence in safe carbon dioxide (CO2) storage, as well as to gain further insights into the amount of methane (CH4) entering the oceans through natural- and industry-related processes. I am involved as PhD supervisor of Ivar-Kristian Waarum, who focuses on the adaptive sampling mechanisms of the AUV - that is, how the AUV should plan its movements to gather as much useful data as possible.
bioAI – Biologically inspired Artificial Intelligence
 bioAI is a research center with members from Simula and the University of Oslo, with the aim to develop brain-inspired artificial intelligence to make advances in theory-development of brain function and AI technology focusing on energy efficiency, explainability, robustness, causal representation learning, and continual learning. Through collaborations on PhD supervision, I and others in my research group are active in this research center, with projects focused on taking inspiration from biological intelligence to make more robust and adaptive AI systems. See the bioAI website for more information.
bioAI is a research center with members from Simula and the University of Oslo, with the aim to develop brain-inspired artificial intelligence to make advances in theory-development of brain function and AI technology focusing on energy efficiency, explainability, robustness, causal representation learning, and continual learning. Through collaborations on PhD supervision, I and others in my research group are active in this research center, with projects focused on taking inspiration from biological intelligence to make more robust and adaptive AI systems. See the bioAI website for more information.
Past Projects
EPEC - Engineering Predictability with Embodied Cognition (2016-2019)
Until 2019, I worked as a postdoctoral fellow at the University of Oslo, funded by the project Engineering Predictability with Embodied Cognition (EPEC). In this project, we took inspiration from the human brain's ability to model the world around us, and make predictions based on such internal models. We studied how similar prediction abilities can be implemented and taken advantage of in computers and robots. We had two target applications where our theories were tested: Robotics and interactive music. See more information at the project webpage,
FlatFish (2014 - 2016)
As part of the FlatFish team at the Brazilian Institute of Robotics, I researched methods for optimizing inspection missions. Using multiobjective optimization methods, I developed a planning algorithm able to optimize inspection quality and the energy usage of the inspection vehicle at the same time. See more info here.
PhD on Evolving Artificial Agents that Learn (2010 - 2014)
My PhD from the Norwegian University of Science and Technology (NTNU) focused on studying the relationship between evolution and learning in artificial agents. Both evolution and learning are powerful adaptation processes, and when used together in a single algorithm, complex inter-dependencies emerge. My thesis is available here. Presentations of selected papers from the PhD are available as videos:
- Neural modularity helps organisms evolve to learn new skills without forgetting old skills
- Costs and Benefits of Learning
- Evolved Sensitive Periods in Learning
Master Thesis on Dynamic Robot Scheduling (2009 - 2010)
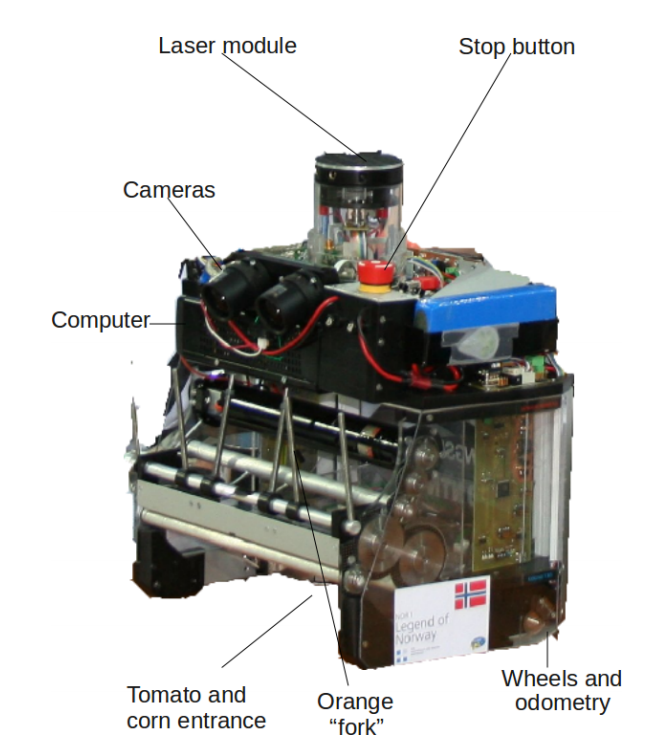
As part of the Norwegian University of Science and Technology's 2010 Eurobot team, I developed a dynamic scheduling algorithm, enabling our robot to plan missions and adapt them to unforeseen circumstances. The thesis is availble here, and a paper on the technique here. The thesis won the 2010 Norwegian Artificial Intelligence Society Best Master Thesis Award.